

Fabrication Robot Quadrupède
La fabrication est finie, il aura fallu un week end et une petite soirée pour dessiner et usiner l'ensemble.
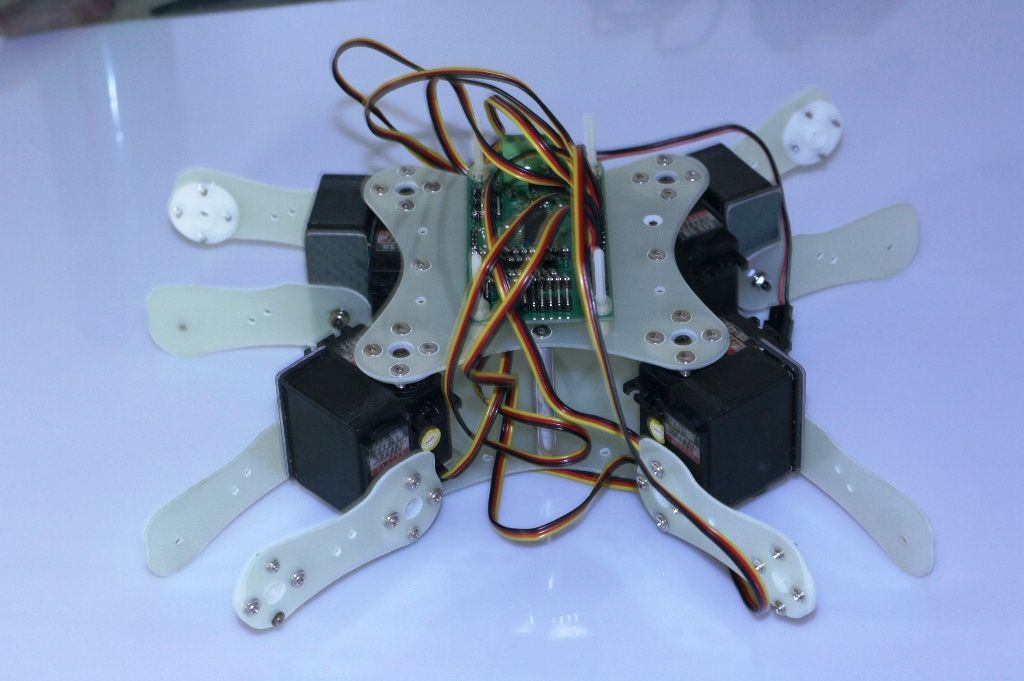
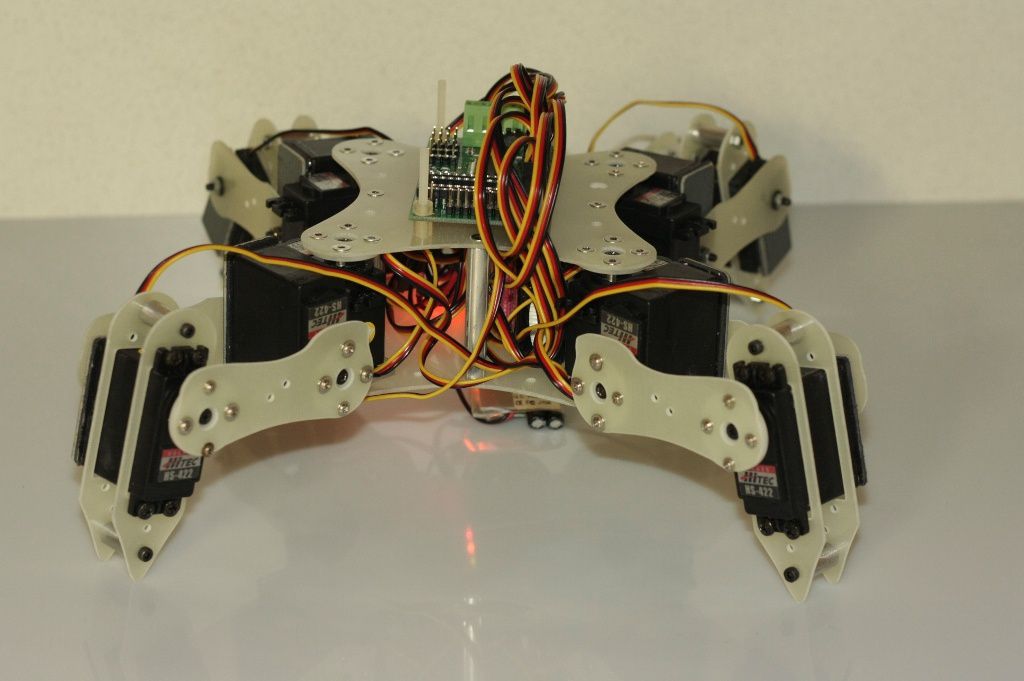
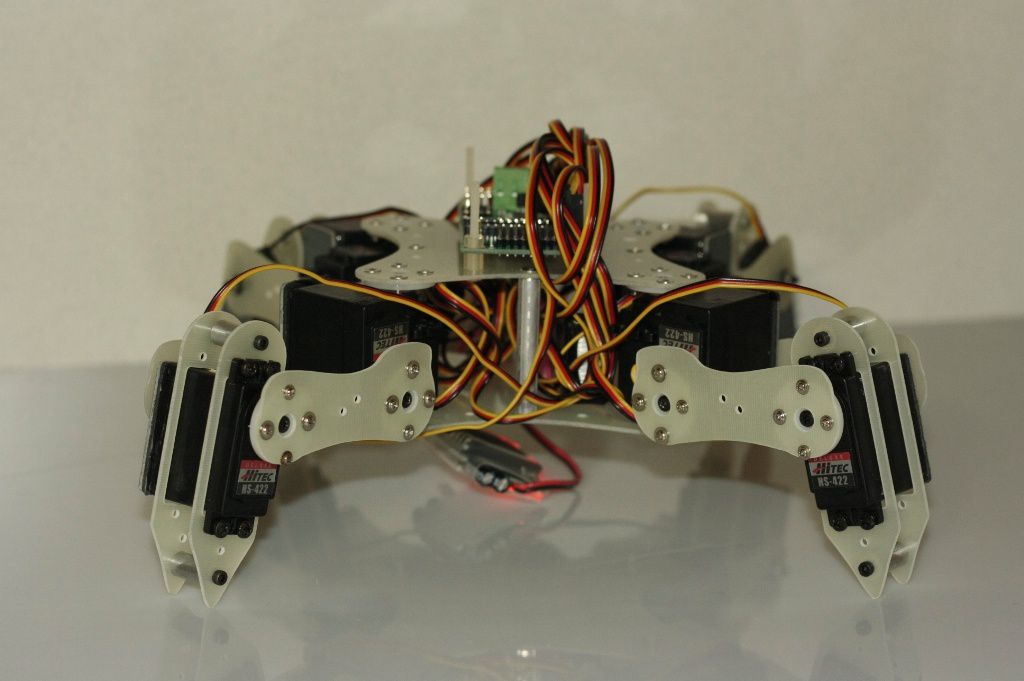
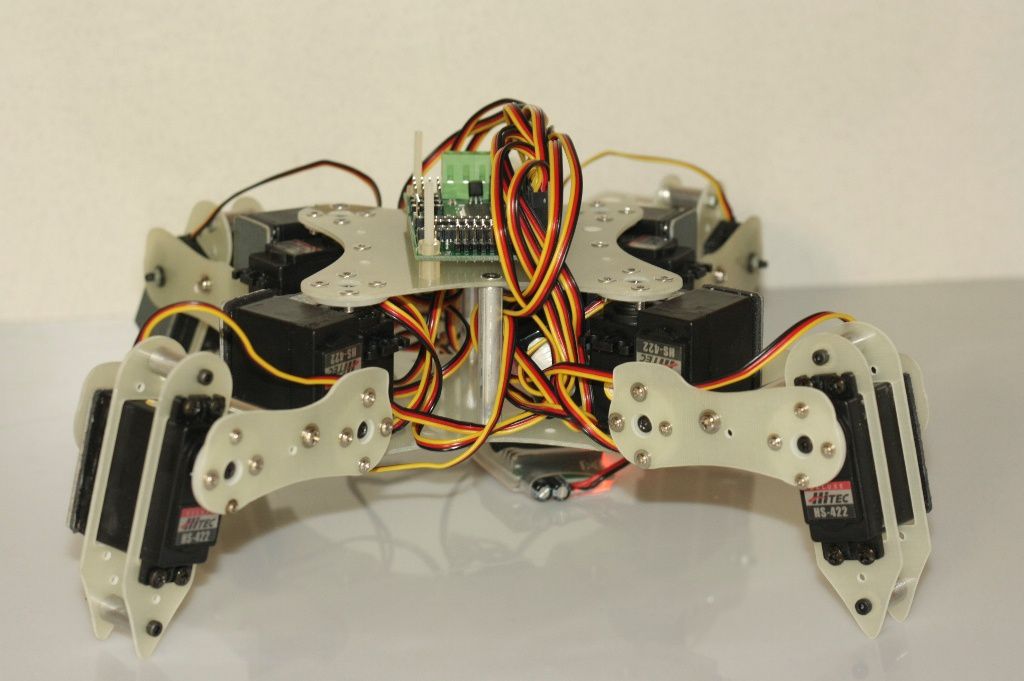
Aux dimensions prêtes, ce petit quadrupède reprend le principe du phantomX vendu par roboshop.com.
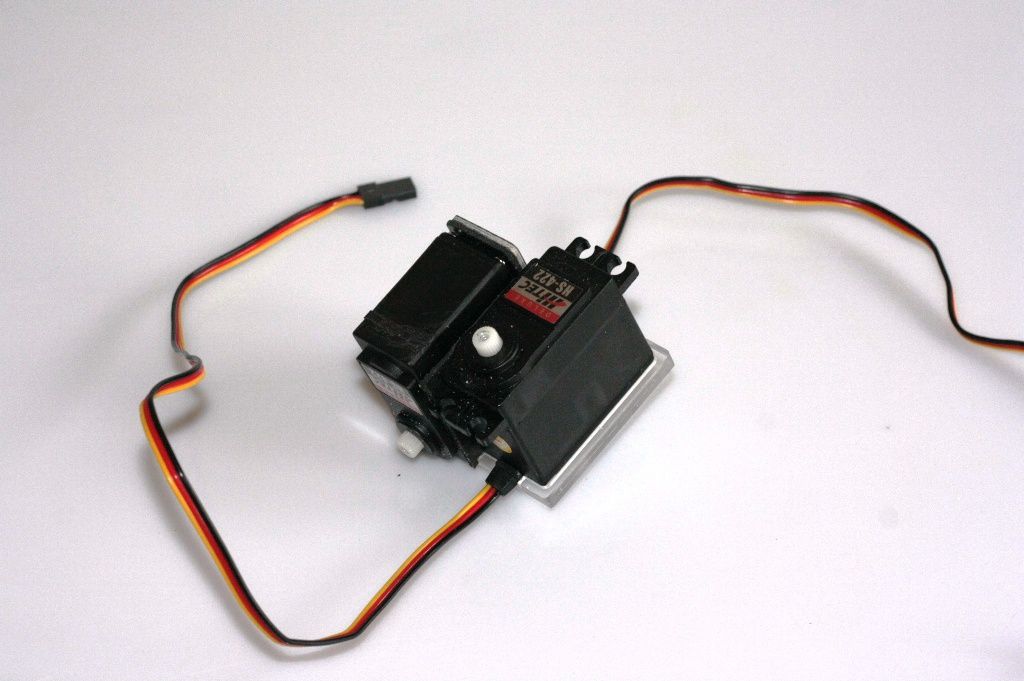
Il est plus modeste, car utilise des servos moyennes gammes, des Hitech HS422. Ils suffisent pour l'animation de la bête car les bras de levier sont assez faibles en comparaison au phantomX qui est équipé de servo plus puissant.
Descriptif :
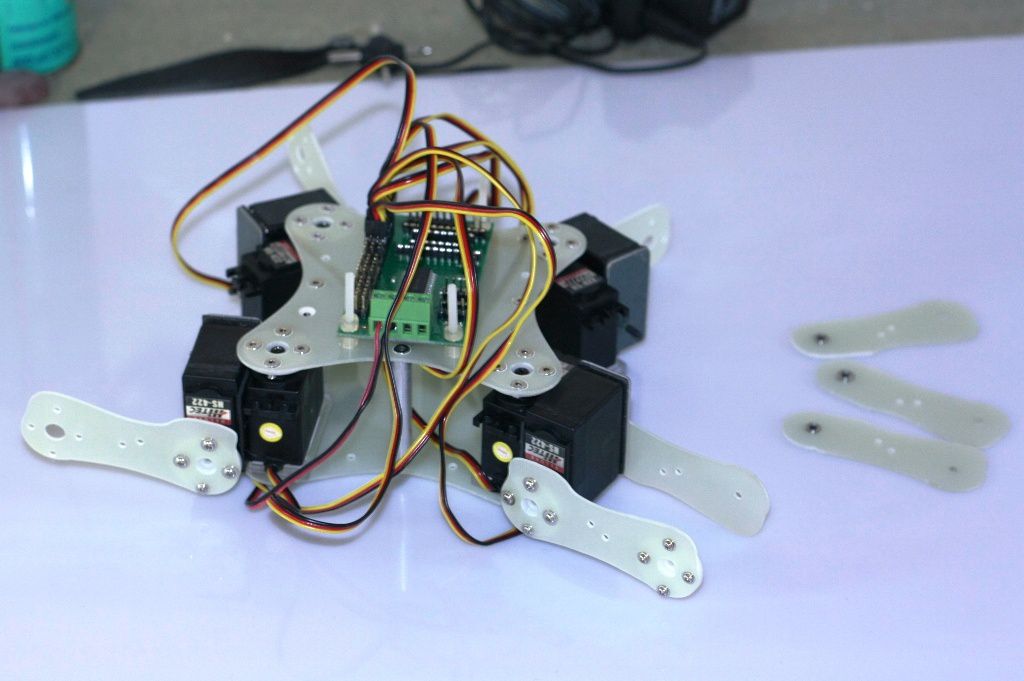
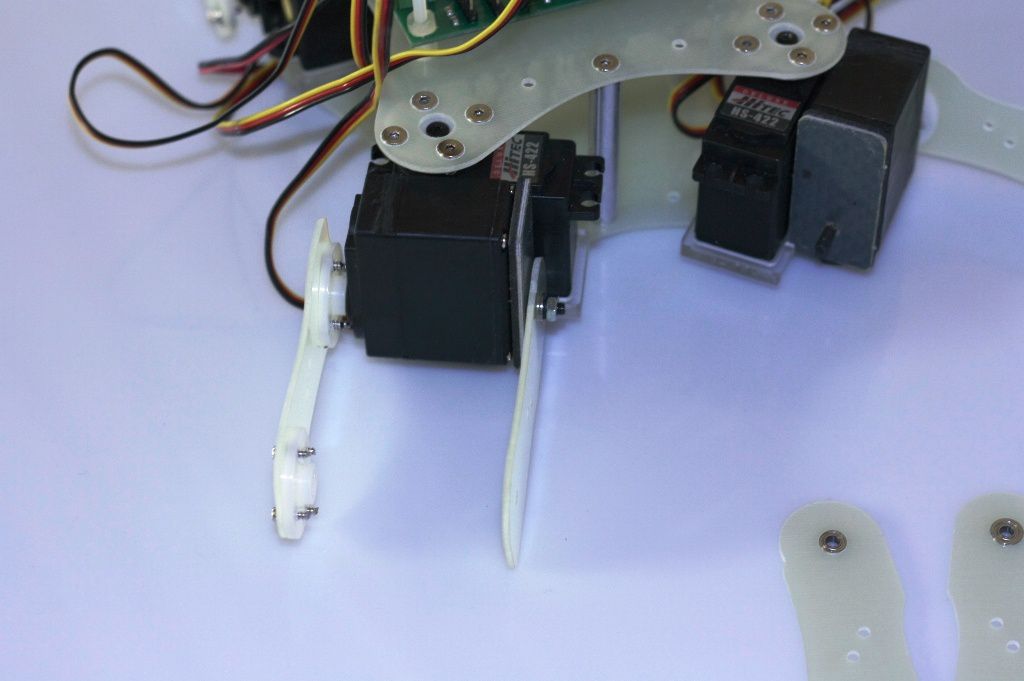
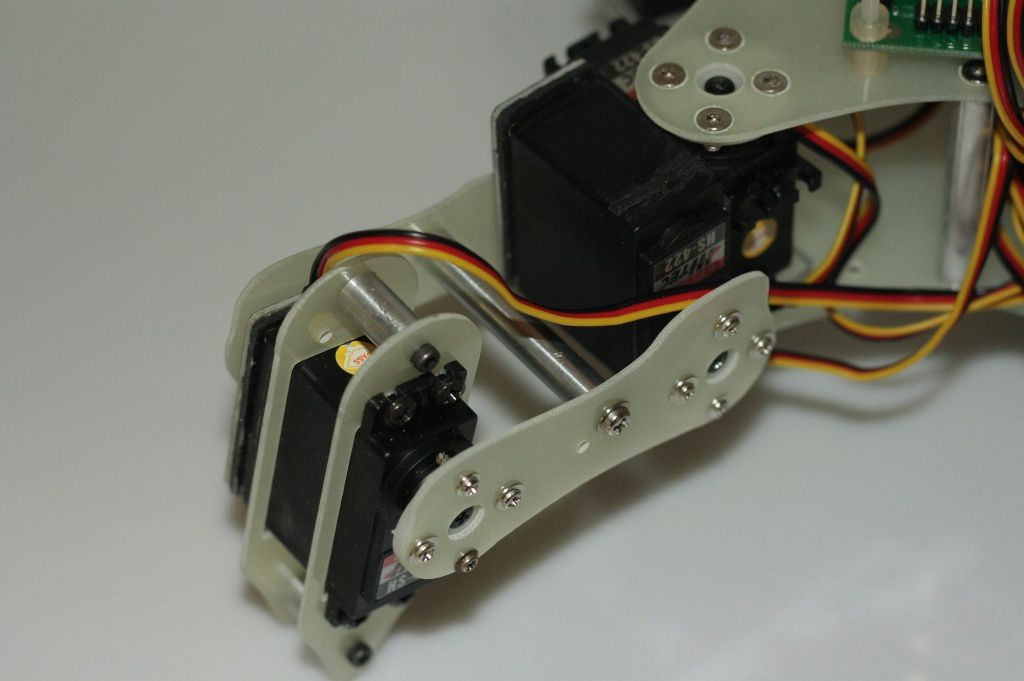
- 4 pattes décomposées en 3 parties, hanche, fémur, tibia ;
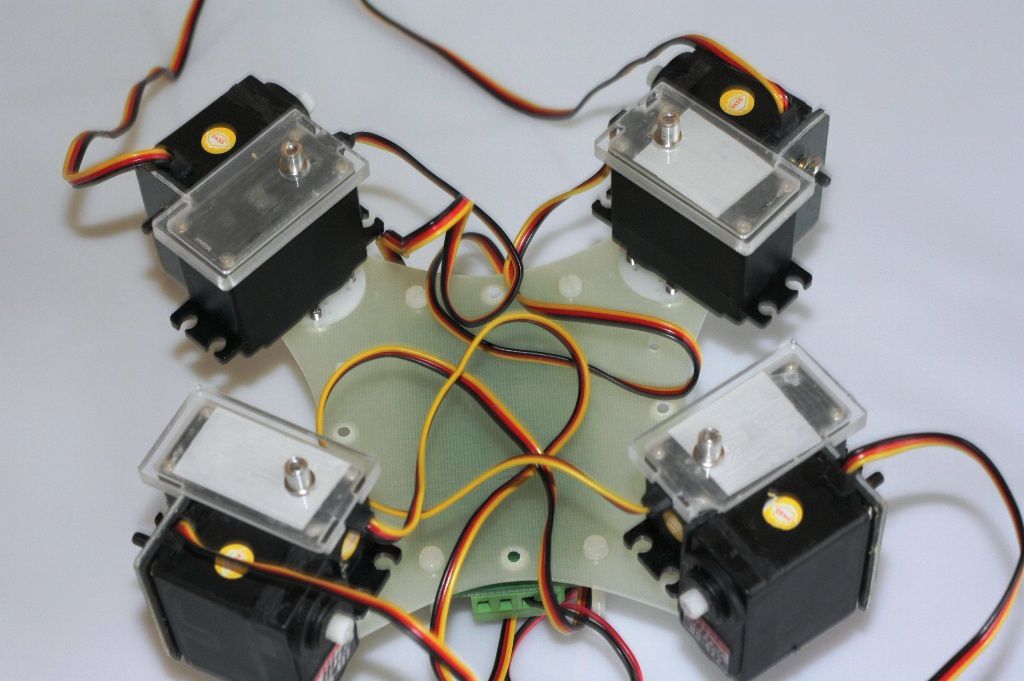
- 3 servos Hitech HS422 par patte soit 12 servos ;
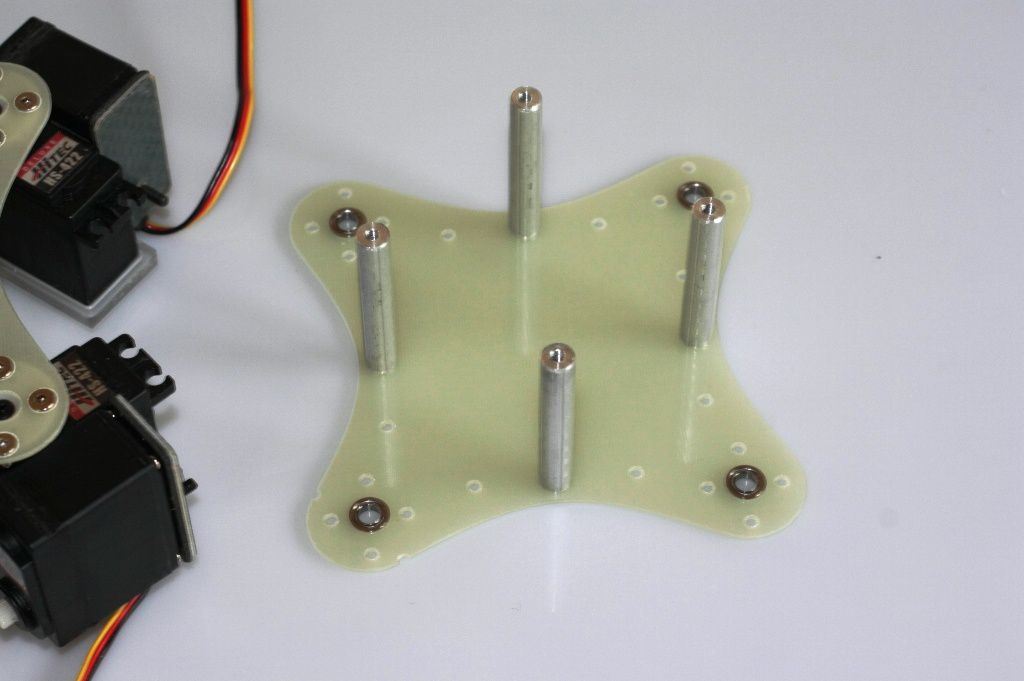
- éléments du chassis et des pattes en époxy 1,5mm (fournitur topmodel) ;
- les 4 servos de hanches sont guidés par des roulements à billes ;
- les fémur sont également sur roulements à billes ;
- les tibias ne sont pas sur roulement à billes car j'en avais plus ! ;
- les éléments sont fixés par vis ou par collant double face ;
- des renforts en alu sont également présents ;
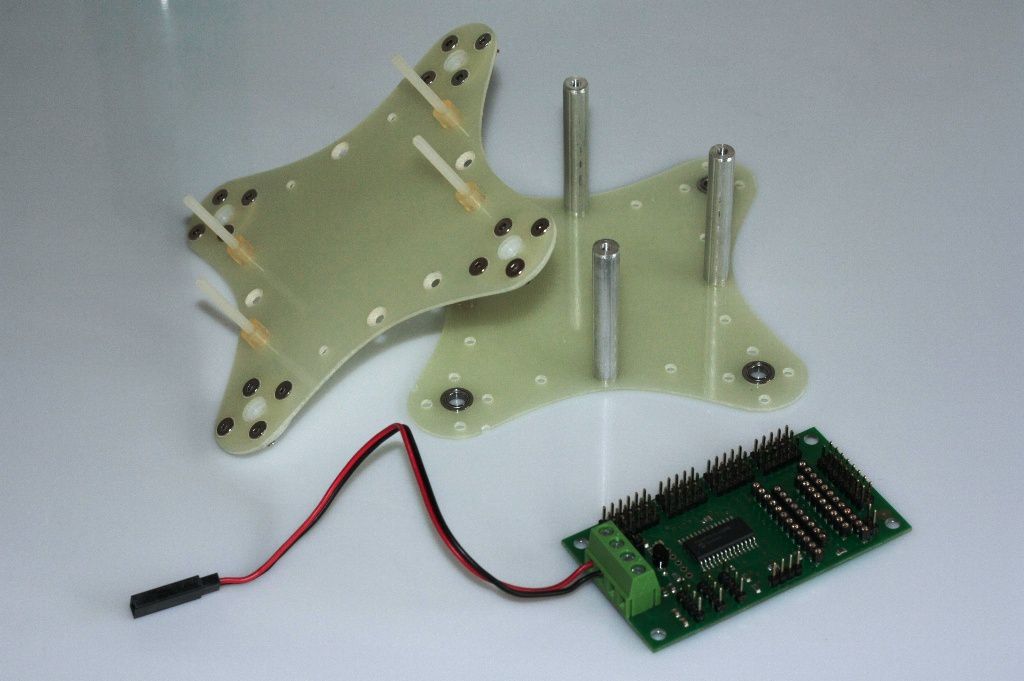
- la carte permettant de gérer les servos est une SD21 (fourniture lextronic) ;
- une carte arduino prendra place pour l'animation de l'ensemble ;
- une batterie LiPo 2S 20C 1600mAh prendra place avec son régulateur de tension 5,5V 6A.
Ci dessous les photos en vrac :
Publicité





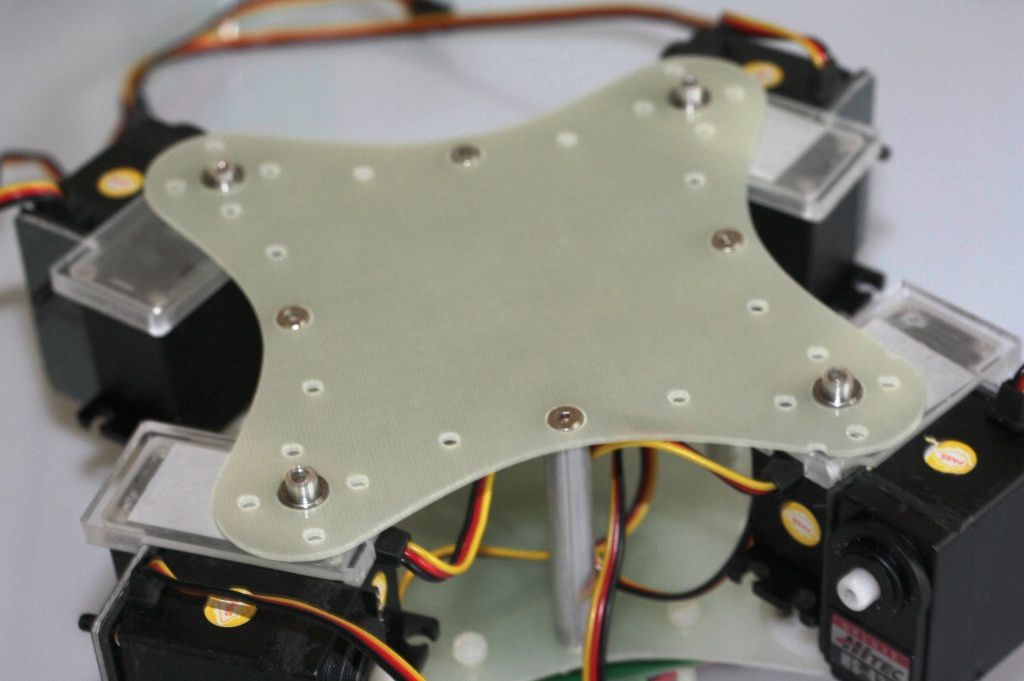







Découpe époxy 1,5 mm. Machine CNC.